齐次坐标#
“齐次坐标表示是计算机图形学的重要手段之一,它既能够用来明确区分向量和点,同时也更易用于进行仿射(线性)几何变换。”—— F.S. Hill, JR。
正如引用中所说,齐次坐标最大的特点在于它的存在可以区分描述 坐标 与 向量
简单的来说,在普通的直角坐标系(或者说笛卡尔坐标系也行)中,(xA, yA) 可以表示点 A,也可以用来表示向量 oA。这种含糊不清的表述方式并不利于准确的抽象描述给计算机。
而齐次坐标通过将 n 维提升到 n+1 维从而解决了这个问题。
我们可以在一个 2D 笛卡尔坐标末尾加上一个额外的变量 w 来形成 2D 齐次坐标,因此,一个点 (X,Y) 在齐次坐标里面变成了(x,y,w),并且有
X = x/w
Y = y/w
如在齐次坐标中
- 描述一个点 A,其表示为 (xA, yA, 1)
- 描述一个向量 $\vec {oA}$,其表示为 (xA, yA, 0)
试着将 w=1,0 带入 x/w,便可以理解为何 1 表示点(位置)、0 表示向量(方向)了。
除此之外也方便进行向量加法之类的操作

当然除了描述向量与点外,齐次坐标的引入也方便描述几何变换 (线性变换)。
比如如果不用齐次坐标表示的二维平移是下图这样的

二维图形基本几何变换#
二维图形变换大致分为以下五类 —— 平移(Translate)、缩放(Scale)、旋转(Rotate)、反射(Reflect)和错切(shear)
1. 平移#
描述从点 (x, y) 到 (x + dx, y+ dy)
引入齐次坐标,可表述为 (x, y, 1) 变形推导为 (x + dx, y+ dy, 1)
此时线性变换便可作为工具描述变换过程了,引入变换矩阵后,该问题就变成了求解变换矩阵
已知:
adgbehcfixy1=x+dxy+dy1
得
⎩⎨⎧ax+by+c=x+dxdx+ey+f=y+dygx+hy+i=1
解得变换矩阵为
100010dxdy1
于是在数学层面我们就可以用这个变换矩阵来描述平移过程了。
2. 缩放#
描述从点 (x, y) 到 (sx*x, sy*y),sx 与 sy 为常量。
引入齐次坐标,可表述为 (x, y, 1) 变形推导为 (sx*x, sy*y, 1)
引入变换矩阵
已知:
adgbehcfixy1=sx∗xsy∗y1
得
⎩⎨⎧ax+by+c=sx∗xdx+ey+f=sy∗ygx+hy+i=1
解得变换矩阵为
sx000sy0001
3. 旋转#
解释旋转需要引入单位圆。
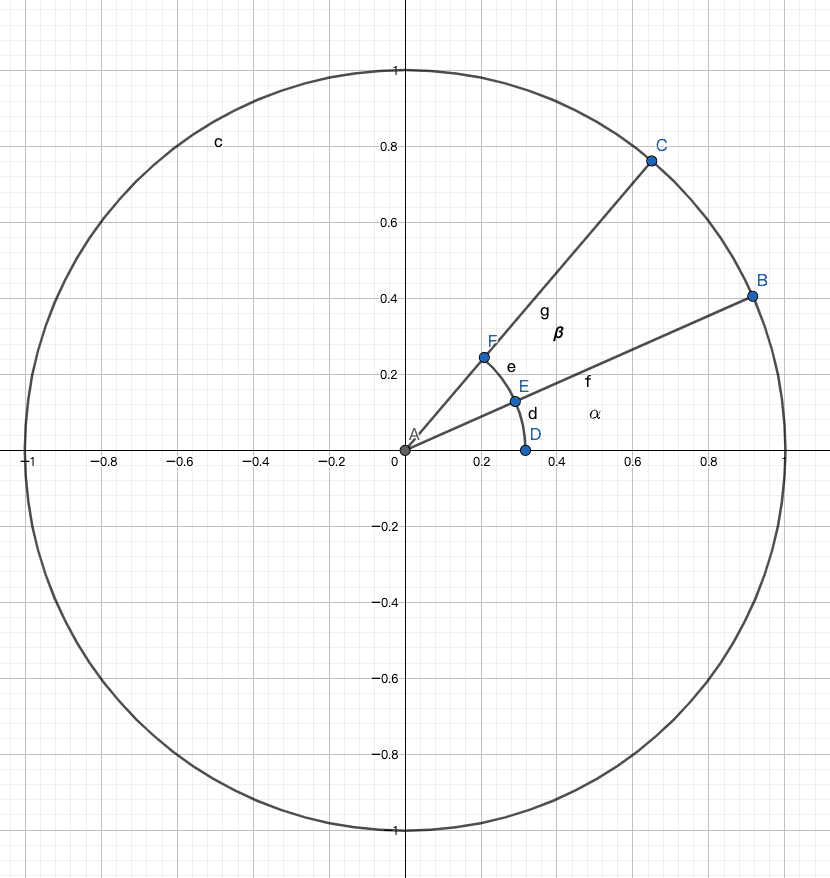
如图,点 B 旋转至 点 C 处,AB 与 X 轴的夹角为 α,AC 与 AB 夹角为 β
则 B 点坐标可表示为 (cosα, sinα), C 点坐标为 (cos (α + β), sin (α + β))
将 C 点坐标展开,则 C 点为 (cosα cosβ - sinα sinβ, sinα cosβ + cosα sinβ)
记 B 点坐标为 (x, y), C 点坐标则为 (x cosβ - y sinβ, y cosβ + x sinβ)
引入齐次坐标,可表述为 (x, y, 1) 变形推导为 (x cosβ - y sinβ, y cosβ + x sinβ, 1)
引入变换矩阵
已知:
adgbehcfixy1=xcosβ−ysinβycosβ+xsinβ1
得
⎩⎨⎧ax+by+c=xcosβ−ysinβdx+ey+f=ycosβ+xsinβgx+hy+i=1
解得变换矩阵为
cosβsinβ0−sinβcosβ0001
4. 反射#
在数学中,反射是把一个物体变换成它的镜像的映射。要反射一个平面图形,需要 “镜子” 是一条直线(反射轴),对于三维空间中的反射就要使用平面作为镜子。
如果根据引用,那么反射可分为根据 X 轴反射与根据 Y 轴反射,但实际上也存在中心反射(点反射)这一概念
根据 X 轴反射#
描述点 (x, y) 到点 (x, -y)
已知:
adgbehcfixy1=x−y1
得:
⎩⎨⎧ax+by+c=xdx+ey+f=−ygx+hy+i=1
解得变换矩阵:
1000−10001
根据 Y 轴反射#
描述点 (x, y) 到点 (-x, y)
已知:
adgbehcfixy1=−xy1
得:
⎩⎨⎧ax+by+c=−xdx+ey+f=ygx+hy+i=1
解得变换矩阵:
−100010001
根据 点 (p, q) 反射#
描述点 (x, y) 到点 (2p-x, 2q-y)
已知:
adgbehcfixy1=2p−x2q−y1
得:
⎩⎨⎧ax+by+c=2p−xdx+ey+f=2q−ygx+hy+i=1
解得变换矩阵:
−1000−102p2q1
5. 错切#
定义见图,其实就像是图形在某一方向上的扭曲,底下只贴推导过程。需注意的是 α 与 β 范围为 [0, 90°)

y 轴为依赖轴的错切变换#
描述点 (x, y) 到点 (x + y.tanα, y)
已知:
adgbehcfixy1=x+y.tanαy1
得:
⎩⎨⎧ax+by+c=x+y.tanαdx+ey+f=ygx+hy+i=1
解得变换矩阵:
100tanα10001
x 轴为依赖轴的错切变换#
描述点 (x, y) 到点 (x, y + x.tanβ)
已知:
adgbehcfixy1=xy+x.tanβ1
得:
⎩⎨⎧ax+by+c=xdx+ey+f=y+x.tanβgx+hy+i=1
解得变换矩阵:
1tanβ0010001